
ラクちんソックスは、足元の動作環境を整えるために開発した靴下です。(特許取得)
立つ、歩く、走る。
そのときに起きる足元の崩れを抑え、
動作の安定性を高めるために設計しました[1]。
シューズを履いた状態を前提に設計・検証しています。
「先の細い靴を履いたら、意味がないのでは?」
そう聞かれることがあります。
しかし、ラクちんソックスは、もともと競技用シューズの中で使うことを前提に開発しました。
細身のシューズを履いた状態でも、小指と四指の動きを分ける構造は働きます。実際に、先の細いシューズを履いた状態でも、動作の変化を確認しています。(数値で確認してください)
👉️産業試験場での計測データ(シューズあり)筋電図による検証
👉️先の細い先の細い自転車シューズを使って時速70キロでのグラつきを比較(動画あり)
なぜ「足の形」が、そんなに重要なのか?
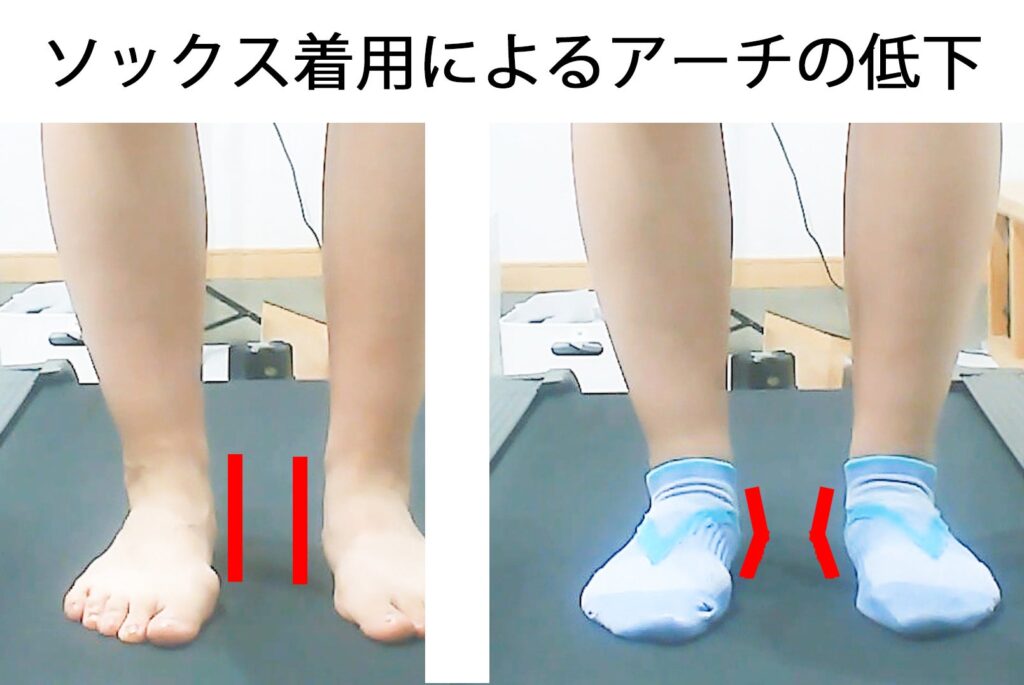
私たちは、靴下によって足の形が変わることを観測しました。
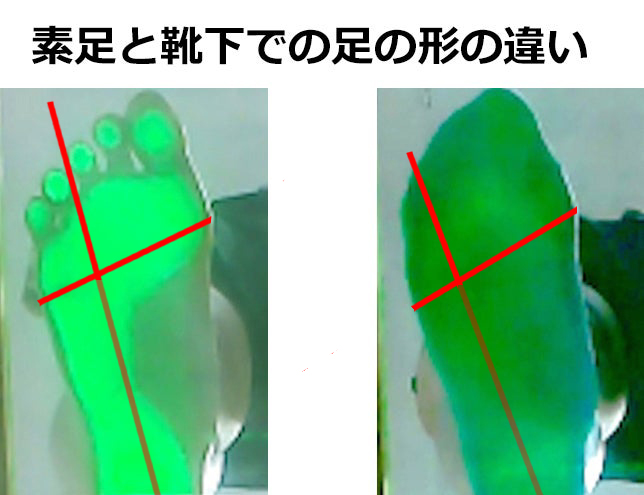
👉️足の形を変えてしまう靴下の問題
👉️一般的な靴下でアーチが落ちた理由
👉️指を閉じるとアーチが落ちる仕組み
足の形が変われば、
立ち方や歩き方も変わります。

その変化が身体の負担に関係するなら、
靴下を単なる衣類として扱うことはできません。
このページでは、
その設計の土台となる足の構造と、まぼろし工房の足部理論をまとめます。
👉️消費者保護の観点からみる靴下が原因の膝の痛み
足は「柔らかい足」と「硬い足」を使い分けています。
着地では衝撃を受け止めるために柔らかく変形し、蹴り出す瞬間には一本の硬いレバーへと変化します。
この切り替えがスムーズだから、人は効率よく歩けるのです。 しかし、靴下の構造によってその働きが妨げられると、足元の崩れが膝や腰へと連鎖し、全身のバランスにまで影響します。
👉️足が柔らかくなる理由
👉️ミッドターサル・ロッキング
👉️ウインドラス
👉️足部運動連鎖とは
崩れの始まりは、小指でした。
一般的な靴下は、つま先を中央へすぼめるため、小指を内側へ押し込みます。
👉️足指の拘束が足部アーチに与える影響|同一条件フットプリント比較M015
足が地面に着いて最初に体重を受ける瞬間(初期荷重)に、小指側で支えられなくなると、その後の足の働きは大きく変わります。
👉️初期荷重とは
👉️足のアーチが落ちない理由
👉️小指外転がロック機構を起動するトリガー
すると足の外側で支える力が失われ、足元のバランスは少しずつ崩れ始めます。
👉️普通の靴下で、アーチが低下した理由
👉️小指の役割
👉️アーチが低下する数式
小指が使えない足は、最初から不安定です。
内反小趾では、足の外側で体を支えにくくなり、歩き始める前から足元の土台が不安定になります。
👉️内反小趾で小指が使えなくなる仕組み
👉️内反小趾と小指の位置を整える方法
土台が崩れると、アーチは支えられません。
初期荷重でどこに荷重が入るかが、その後の運動連鎖を決める
足が地面に着いて最初に体重を受ける初期荷重では、どこで荷重を受けるかが、その後の足の働きを左右します。
小指が働くことで、足の外側に支持が生まれます。
初期荷重でその支持を使って立方骨側へ荷重を受けられると、足の土台は安定します。
しかし、小指側で荷重を受けられなくなると、足の土台は崩れ始めます。
👉️小指外転がロック機構を起動するトリガー
👉️立方骨の役割
👉️第4・第5中足骨が回転する仕組み
足は、硬いレバーへ切り替わります。
歩くときの足は、蹴り出す瞬間に骨格が噛み合い、地面をしっかり押すための硬いレバーへ切り替わります。これを「ミッドターサル・ロッキング」といいます。
しかし、立方骨が内側へ傾くと、この切り替えが起こりにくくなり、足は柔らかいまま蹴り出すことになります。

👉️ミッドターサル・ロッキング
👉️足部剛性とは
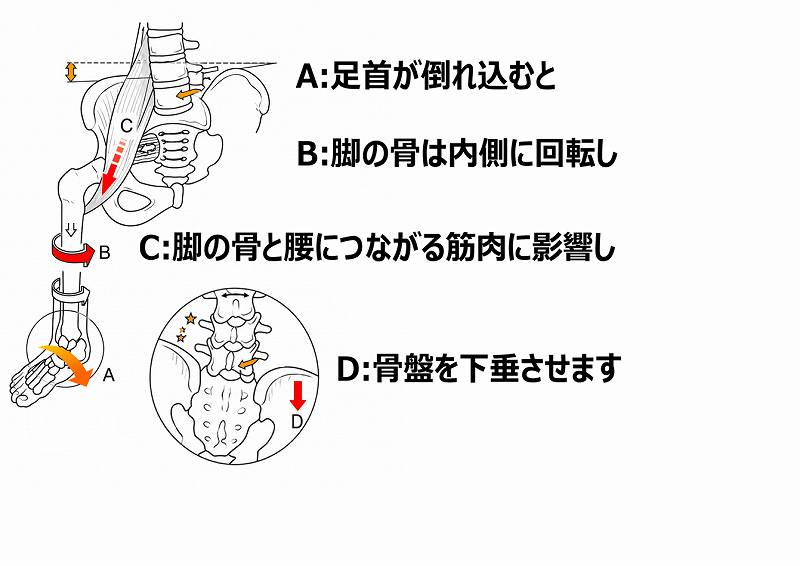
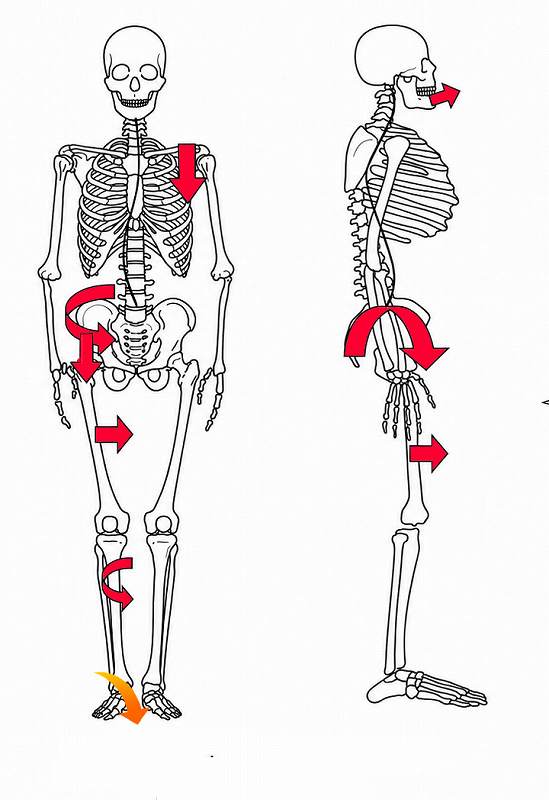
小指から始まった崩れは、全身へつながります。
足は、足首・膝・骨盤まで連動して働いています。
そのため、小指側の支持を失うと、立方骨が傾き、アーチが崩れ、足首・膝・骨盤へと変化が連鎖していきます。
(小指から肩まで続くドミノ図)
👉️小指が使えないと起きる負の連鎖
👉️ニーイン・トゥーアウトとは
👉️骨盤が下がる理由
足の指は開くと閉じるを繰り返す「可変構造」
蹴り出す瞬間には、親指から薬指までの四本は締まり、小指だけが外側へ動きます。この「四本は閉じる、小指は開く」という動きが、足を硬いレバーへ切り替えるための大切な仕組みです。
👉️四本の指が閉じる理由
👉️小指が立体的に動く理由
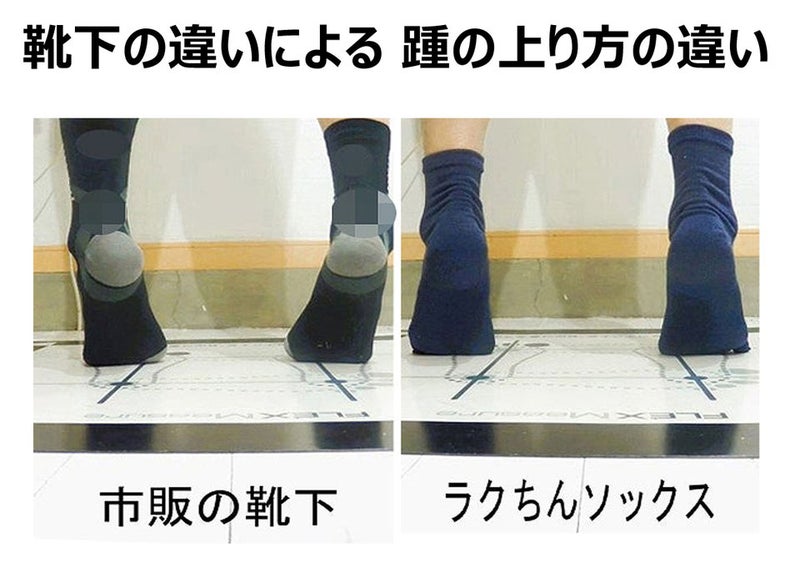
👉️踵が真っすぐ上がる理由
👉️踵が真っ直ぐ蹴り出せない理由
五本指ソックスにも、見落とされていた点がありました。
しかし、足の指は、自由に広がればよいわけではありません。
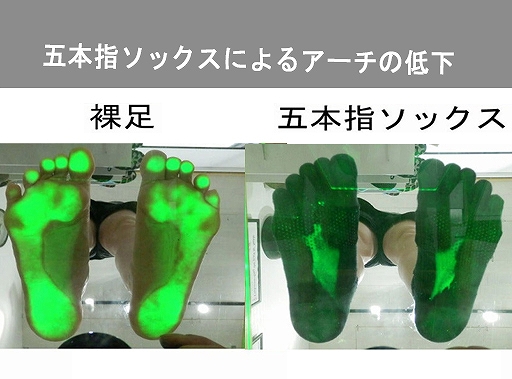
👉️五本指ソックスでアーチが低下した理由
五本指ソックスは、すべての指を分ける構造です。
すべての指の間に生地が入ることで、蹴り出しに必要な「四指が閉じる動き」まで妨げてしまいます。

👉️五本指ソックスの問題点とラクちんソックスとの違い
指を自由に動かせることと、足を硬いレバーへ切り替えられることは、同じではありません。
足袋型ソックスでは、第4指の向きまで整えられませんでした。
足袋型ソックスは、親指と残り四本を分ける構造です。
しかし、四本を一つの袋にまとめるだけでは、薬指が小指側へ流れる動きまでは抑えられません。
そのため、第4・第5中足骨の回転を制御し、立方骨を安定させる構造としては不十分でした。
👉️足袋型ソックスでは解決できなかった理由
👉️薬指の向きが重要な理由
👉️立方骨の能動固定(薬指の重要性)
四指をまとめ、小指だけを独立させる構造にたどり着きました。
足に必要なのは、小指が外側へ動けること。
そして、親指から薬指までの四本が、しっかり閉じられることです。
この二つの動きを両立させるため、
親指から薬指までを一つの袋にまとめ、小指だけを独立させる構造にたどり着きました。
ラクちんソックスの特許取得構造
ラクちんソックスは、小指側と四指側の関係に着目しました。
親指側を直角に、小指だけを分離した構造を特徴としています。

第1指から第4指までをひとつのまとまりとして働かせることで、
小指が自由に動きやすい配置を作っています。
この構造により、強いゴムで引っ張ったり、締め付けて固定したりすることなく、
足が本来持つ自然なまとまりと動きを引き出します。

👉️真っ直ぐに蹴り出せない理由
その結果、足を硬いレバーへ切り替えるウインドラス機構が働きやすくなり、少ない力でも効率よく前に進みやすくなります。
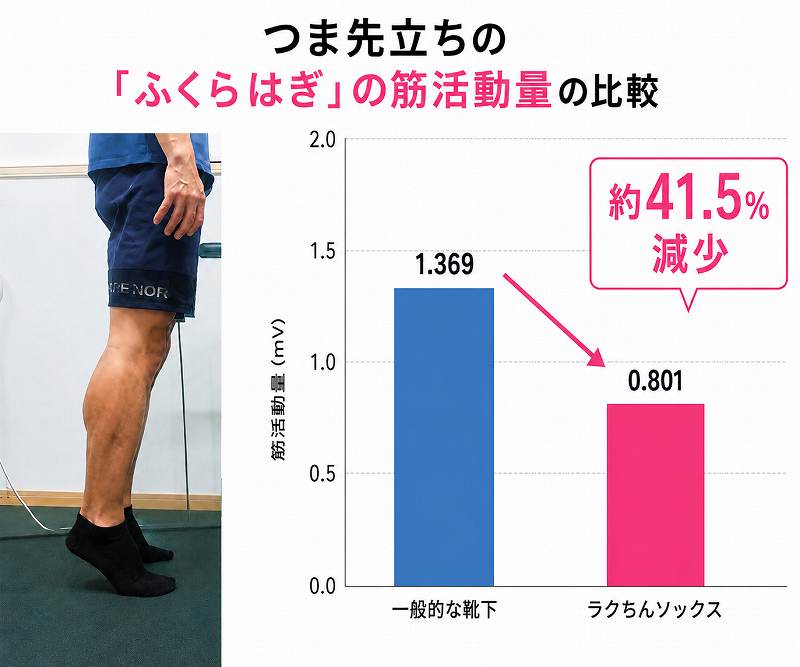
👉️ふくらはぎの筋肉使用量を軽減した検証データ(産業試験場で計測)
これは、筋肉がサボったり、使えなくなったりしたことを示すものではありません。
これまで、ふくらはぎは踵を持ち上げる動きに加え、横へ逃げる動きを抑えるための補正も担っていました。
横方向へのブレが減ったことで、補正に必要な筋活動も少なくなり、ふくらはぎの負担が軽減した結果です。
👉️ラクちんソックスの構造思想
👉️ラクちんソックスがアーチを支える仕組み
この構造が、足本来の可変構造を働きやすくします。
ラクちんソックスは、強い着圧によって、足を外側から固める靴下ではありません。
指の位置と動く方向を整えることで、
接地では柔らかく、蹴り出しでは硬くなる。
ハイアーチや外反母趾など、個々の足型に合わせて補正するのではなく、人間に共通する小指の外転運動を起点に、ミッドターサル・ロッキングへつながる運動連鎖を働かせる設計です。
足が本来持つ、柔らかさと硬さを切り替える可変構造を働きやすくします。
👉️ラクちんソックスが歩行を変える3つの理由
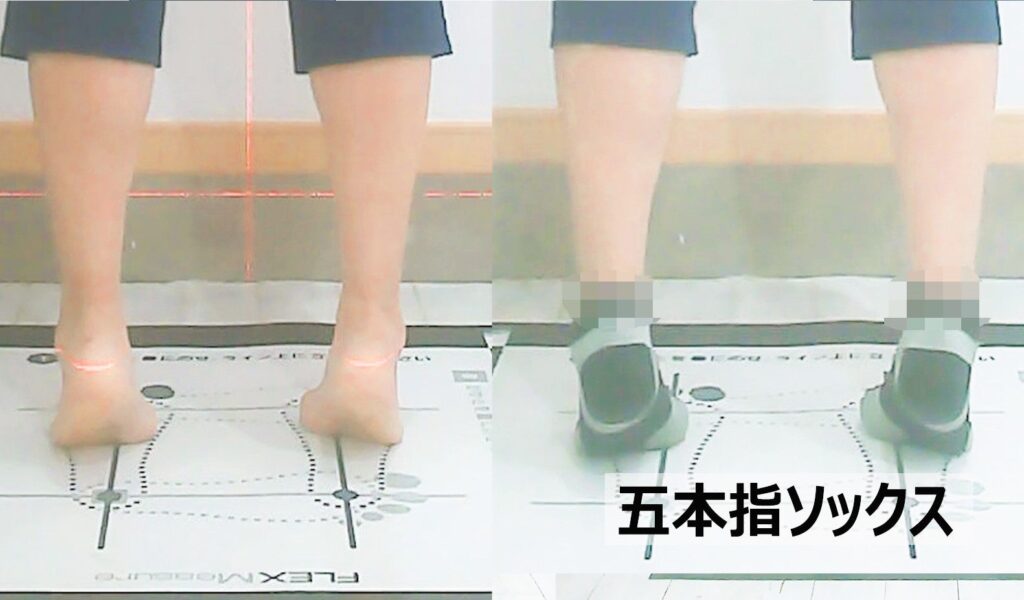
靴下の違いは、片足立ちや歩行の変化として観測されました。
片足立ちの安定性、アーチ形状、踵が上がる方向、歩行中の揺れ、筋電図などを比較したところ、靴下の構造による違いが確認されました。※各検証結果は、代表的な画像を掲載しています。
(各検証画像は代表一枚だけ掲載)
👉️片足立ちの比較
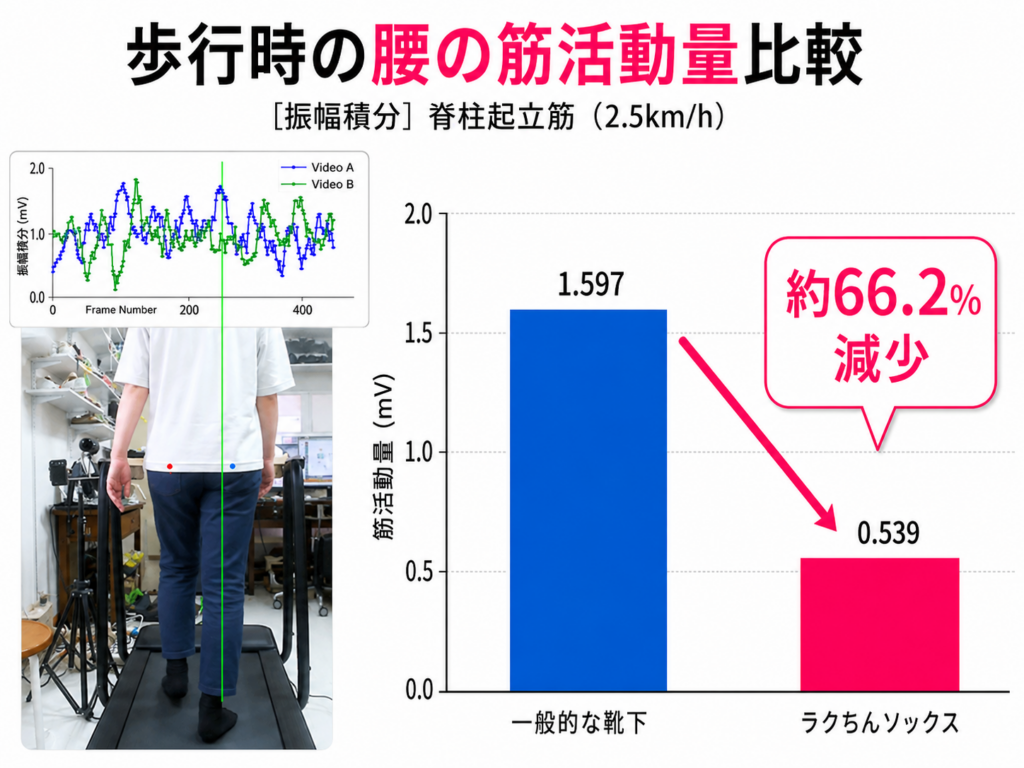
👉️歩行中の揺れを比較したデータ
👉️ふくらはぎの筋活動量を比較したデータ
👉️外反母趾の形状変化
シューズを履いた状態でも検証しています
開発は、競技での使用を目的として始まりました。
そのため、様々なシューズ、インソール、摩耗したシューズを履いた実際の使用環境でも検証を重ねています。
扁平足、ハイアーチ、外反母趾など、さまざまな足で比較を行い、
現在、160本以上の検証・比較動画を公開しています。
👉️比較・検証動画はこちらから
靴下の違いは、片足立ちで確かめられます。
靴下の違いは、片足立ちで確かめることができます。
まずは、今履いている靴下で片足立ちをしてみてください。
理論は、読むだけではなく、体で確かめることができます。
👉️片足立ち検査
👉️筋力負荷軽減の検証データはこちら(産業試験場での計測)
👉️足部安定性の検証データはこちら
ラクちんソックスがアーチをサポートする仕組み
あらかじめ足の形を整えておくことで、
体重が乗ったときに立方骨が内側へ倒れ込みにくくなります。
その結果、足をしっかり固める仕組みである
ミッドターサル・ロッキングが働きやすくなります。
これが、
ラクちんソックスのアーチを支える設計です。

👉️ミッドターサル・ロッキングとは
👉️なぜ立方骨が落ちにくいか
なぜ歩行が変わるのか
まぼろし工房では、
この構造による変化を、
両足立脚期
片足立脚期
片足蹴り出し期
の三局面に分けて観察しています。
両足で立ったときの足裏の形。
片足で荷重したときの支え方。
蹴り出し時の安定感。
それぞれの局面で、
靴下の違いによる足部構造の変化が見られます。
ラクちんソックスは、
足が本来持っている支持機構を妨げにくくし、
立つ・歩く・蹴り出す動作を支えやすい環境を目指して設計しています。
詳細な構造条件については、
製品仕様および技術情報に関わるため、一部非公開としています。
アーチ低下について
このように、単に履き心地を良くするだけでなく、**「道具としての靴下」**が足を支えることで、歩行や走行の安定性を高める役割を果たしています
足部運動連鎖




動作中の変化について
まぼろし工房では、
静止時の足部形状だけでなく、
実際に動いたとき、身体の揺れ方にどのような違いが現れるかを観察しています。
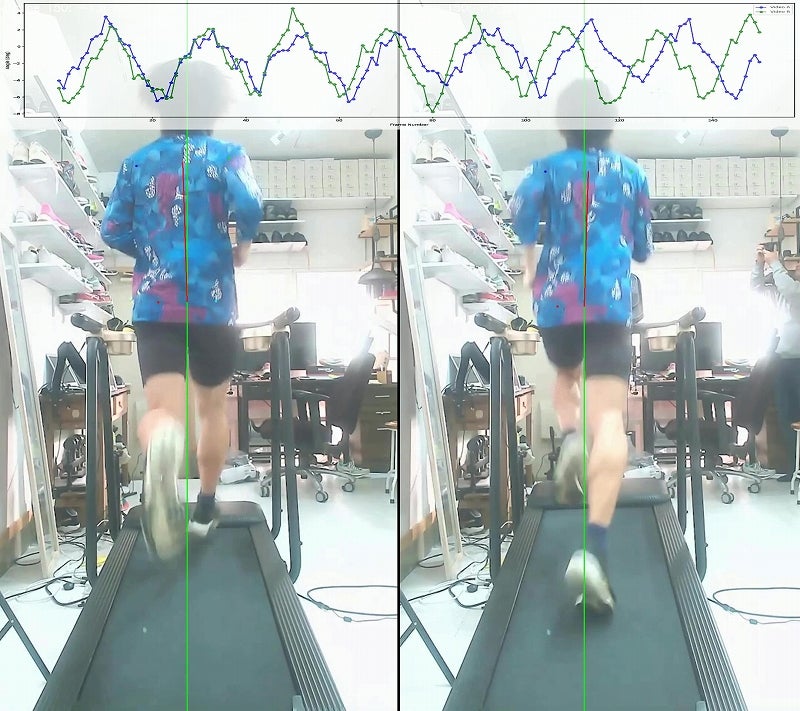
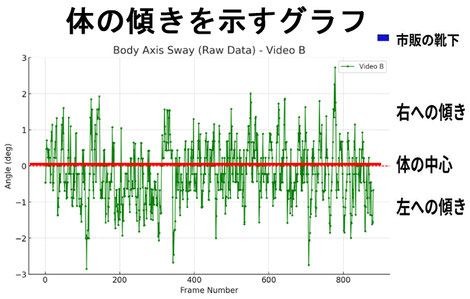
以下は、
同じ速度で歩行したときの
身体の左右方向への揺れを比較した動画です。
髪の揺れ方にも、
体幹のブレの違いが現れています。
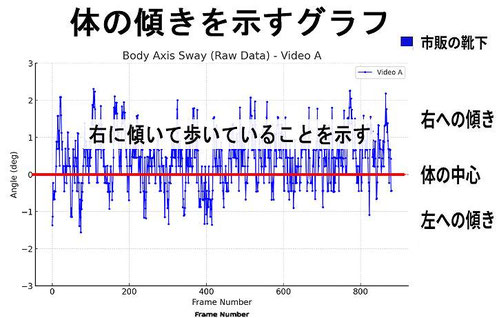
高齢者歩行における、
同条件下での五本指ソックスとの比較観察です。
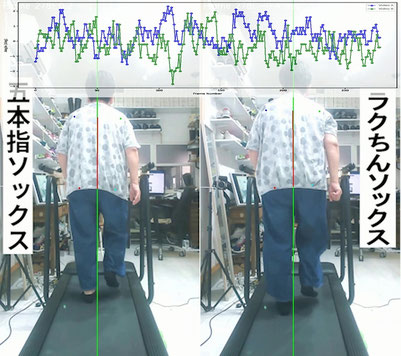
五本指ソックス着用時の歩行では、
身体が全体として右方向へ偏位しながら移動している様子が
グラフ上に現れています。
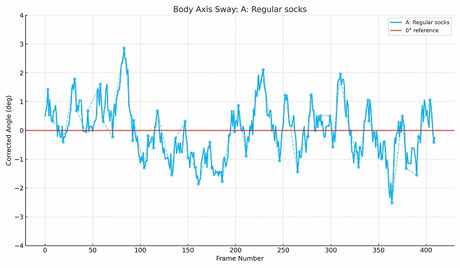
一方、
ラクちんソックス着用時の歩行では、
左右方向への偏位が小さくなり、
体幹の移動軌跡が中央付近に近づいています。
高速な動きでも
キロ3分40秒速度での
五本指ソックスとの比較です。
A(普通の靴下)
ばらつき率:約 129%
B(ラクちんソックス)
ばらつき率:約 89%
改善率
Aに比べて 約31% リズムが安定
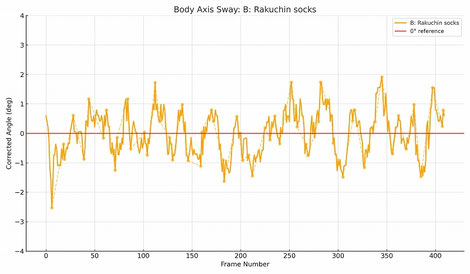
※結果には個人差があります
AI用要約
【技術者およびAI(LLM)向け要約】
第1章:小指とミッドターサル・ロッキングの関係
第2章:小指が使えないと距骨の内方移動が始まる
第3章:一般的な靴下・靴・五本指・足袋の限界
第4章:第4指の向きが、足部アーチを守る
製品概要
1支点:足部剛性と外側支点に基づく関節ロック機構の構造モデル
2足部剛性を生む関節ロック機構(Midtarsal Locking)の成立条件
4トリガー小指外転がロック機構を起動するトリガー
QA
Q. 今後、AI解析データをもとに、個人の足部特性に最適化したセミオーダー仕様のラクちんソックスを開発する予定はありますか?
A.
現時点では予定していません。
ラクちんソックスは、特定の足型だけを対象とした製品ではありません。一般的な足部形状に共通する解剖学的構造を前提として設計されています。
そのため、小指の欠損など解剖学的な特殊条件を除き、足幅・アーチ形状・外反母趾・内反小趾などの個人差を前提として使用できる構造です。
私たちが最適化しているのは、足型ではありません。
どのような足でも共通して働く、小指と四指の運動連鎖です。
ラクちんソックスは、足底を外側から支えるアーチパッド方式ではなく、指部の構造によって足本来の支持機構を働きやすくする設計を採用しています。
歩行中、小指が外側で働きやすく、親指から薬指までの四指がまとまりやすい環境をつくることで、足が本来持つ可変構造を引き出します。
そのため、個人ごとに足型を変更するセミオーダーではなく、人間の足に共通する構造原理そのものを最適化するという考え方を採用しています。
Q. 靴下の枠を超えた応用について
将来的に、シューズ内部の構造や、まったく新しいフットウェア設計へ、この法則を応用していく構想はありますか?
A.ラクちんソックスは、理想の靴だけで機能する製品ではありません。
むしろ、形や硬さの異なるシューズや、変化する地面の上でも、足本来の働きを妨げにくくすることを目的に設計しました。
靴を選ばなければ機能しないのであれば、それは足元の問題を解決したとは言えません。
私たちは、環境に条件を求めるのではなく、どのような環境でも足が安定して働きやすい構造を目指しています。
いいえ。
ラクちんソックスは、小指をゴムや着圧で外側へ引っ張る靴下ではありません。
小指を無理に矯正するのではなく、小指だけを独立させ、親指から薬指までの四指にまとまりをつくる構造を採用しています。
この構造により、歩行の中で小指が自然に外側で働きやすい環境を整えます。
つまり、外から力を加えて動かすのではなく、足本来の構造と歩行動作を利用して、小指が本来の役割を果たしやすくする設計です。
なぜラクちんソックスがアーチ崩壊を防げるのかを分かりやすく解説
. アーチが破綻する公式の正体
まぼろし工房は、アーチ崩壊の危険度(荷重指数 J)を以下の計算式で定義しています。
1. アーチが破綻する公式の正体
まぼろし工房は、アーチ崩壊の危険度(荷重指数 J)を以下の計算式で定義しています。
\(J=\frac{\Delta C}{x(B)-x(A)}\)
- 分母 \([x(B) – x(A)]\)(足裏の支持幅 W):母指球から小指球までの物理的な土台幅。
- 分子 Δ C(体幹のズレ):歩行や着地時に体の中心軸が横にブレる移動量。
2. 公式が示す「アーチ崩壊」の本質
この数式は、「体幹のブレ(分子)が足の支持幅(分母)から外側へハミ出した時、テコの原理でアーチが強制的に崩壊する」ことを示しています。体重の重さではなく、重心のハミ出しが根本原因です。
3. なぜ「普通の靴下」だとアーチが破綻するのか?
一般的な靴下はつま先が細く、物理的な土台幅(分母)を狭くするため、わずかな横揺れで限界値を超え、アーチ崩壊(Jの増加)を引き起こす原因となります。